 |
| August 01, 2017 | Volume 13 Issue 29 |
Motion Control News & Products

Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Overhung load adaptors provide load support and contamination protection
 Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Learn more.
Why choose electric for linear actuators?
 Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Get this informative e-book. (No registration required)
New AC hypoid inverter-duty gearmotors
 Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Learn more.
Next-gen warehouse automation: Siemens, Universal Robots, and Zivid partner up
 Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Read the full article.
Innovative DuoDrive gear and motor unit is UL/CSA certified
 The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
Learn more.
BLDC flat motor with high output torque and speed reduction
 Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Learn more and view all the specs.
Application story: Complete gearbox and coupling assembly for actuator system
 Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Read this informative GAM blog.
Next-gen motor for pump and fan applications
 The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
Learn more.
Telescoping linear actuators for space-constrained applications
 Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Learn more.
Competitively priced long-stroke parallel gripper
 The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
Learn more.
Extend your range of motion: Controllers for mini motors
 FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
Learn more.
When is a frameless brushless DC motor the right choice?
 Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
View the video.
Tiny and smart: Step motor with closed-loop control
 Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Learn more.
Closed loop steppers drive new motion control applications
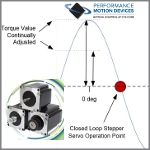 According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
Read this informative Performance Motion Devices article.
Intelligent compact drives with extended fieldbus options
 The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
Learn more.
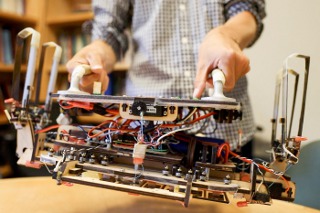
Engineers design a robotic gripper for cleaning up space debris
Researchers combined gecko-inspired adhesives and a custom robotic gripper to create a device for grabbing space debris. They tested their gripper in multiple zero-gravity settings, including the International Space Station.
By Taylor Kubota, Stanford University
Right now, about 500,000 pieces of human-made debris are whizzing around space, orbiting our planet at speeds up to 17,500 mph. This debris poses a threat to satellites, space vehicles, and astronauts aboard those vehicles.
What makes tidying up especially challenging is that the debris exists in space. Suction cups don't work in a vacuum. Traditional sticky substances, like tape, are largely useless because the chemicals they rely on can't withstand the extreme temperature swings. Magnets only work on objects that are magnetic. Most proposed solutions, including debris harpoons, either require or cause forceful interaction with the debris, which could push those objects in unintended, unpredictable directions.
To tackle the mess, researchers from Stanford University and NASA's Jet Propulsion Laboratory (JPL) have designed a new kind of robotic gripper to grab and dispose of the debris, featured in the June 27 issue of Science Robotics.

Hao Jiang, graduate student in the Cutkosky lab and lead author of the paper, shows a basketball being gripped by the gecko-inspired adhesive.
"What we've developed is a gripper that uses gecko-inspired adhesives," said Mark Cutkosky, professor of mechanical engineering and senior author of the paper. "It's an outgrowth of work we started about 10 years ago on climbing robots that used adhesives inspired by how geckos stick to walls."
The group tested their gripper, and smaller versions, in their lab and in multiple zero-gravity experimental spaces, including the International Space Station. Promising results from those early tests have led the researchers to wonder how their grippers would fare outside the station, a likely next step.
"There are many missions that would benefit from this, like rendezvous and docking and orbital debris mitigation," said Aaron Parness, MS '06, PhD '10, group leader of the Extreme Environment Robotics Group at JPL. "We could also eventually develop a climbing robot assistant that could crawl around on the spacecraft, doing repairs, filming and checking for defects."
Creating a gecko gripper
The adhesives developed by the Cutkosky lab have previously been used in climbing robots and even a system that allowed humans to climb up certain surfaces. They were inspired by geckos, which can climb walls because their feet have microscopic flaps that, when in full contact with a surface, create a Van der Waals force between the feet and the surface. These are weak intermolecular forces that result from subtle differences in the positions of electrons on the outsides of molecules.
The gripper is not as intricate as a gecko's foot -- the flaps of the adhesive are about 40 micrometers across, while a gecko's are about 200 nanometers -- but the gecko-inspired adhesive works in much the same way. Like a gecko's foot, it is only sticky if the flaps are pushed in a specific direction, but making it stick only requires a light push in the right direction. This is a helpful feature for the kinds of tasks a space gripper would perform.
"If I came in and tried to push a pressure-sensitive adhesive onto a floating object, it would drift away," said Elliot Hawkes, MS 11, PhD 15, a visiting assistant professor from the University of California, Santa Barbara and co-author of the paper. "Instead, I can touch the adhesive pads very gently to a floating object, squeeze the pads toward each other so that they're locked, and then I'm able to move the object around."
Close up of the robotic gripper made by the Cutkosky lab at Stanford University. The gripper is designed to grab objects in zero gravity using their gecko-inspired adhesive.
The pads unlock with the same gentle movement, creating very little force against the object.
The gripper the researchers created has a grid of adhesive squares on the front and arms with thin adhesive strips that can fold out and move toward the middle of the robot from either side, as though it's offering a hug. The grid can stick to flat objects, like a solar panel, and the arms can grab curved objects, like a rocket body.
One of the biggest challenges of the work was to make sure the load on the adhesives was evenly distributed, which the researchers achieved by connecting the small squares through a pulley system that also serves to lock and unlock the pads. Without this system, uneven stress would cause the squares to unstick one by one, until the entire gripper let go. This load-sharing system also allows the gripper to work on surfaces with defects that prevent some of the squares from sticking.
The group also designed the gripper to switch between a relaxed and rigid state.
"Imagining that you are trying to grasp a floating object, you want to conform to that object while being as flexible as possible, so that you don't push that object away," explained Hao Jiang, a graduate student in the Cutkosky lab and lead author of the paper. "After grasping, you want your manipulation to be very stiff, very precise, so that you don't feel delays or slack between your arm and your object."
Gecko-inspired adhesive in zero-G
The group first tested the gripper in the Cutkosky lab. They closely measured how much load the gripper could handle, what happened when different forces and torques were applied, and how many times it could be stuck and unstuck. Through their partnership with JPL, the researchers also tested the gripper in zero-gravity environments.
In JPL's Robodome, they attached small rectangular arms with the adhesive to a large robot, then placed that modified robot on a floor that resembled a giant air-hockey table to simulate a 2D zero-gravity environment. They then tried to get their robot to scoot around the frictionless floor and capture and move a similar robot.
"We had one robot chase the other, catch it, and then pull it back toward where we wanted it to go," said Hawkes. "I think that was definitely an eye-opener, to see how a relatively small patch of our adhesive could pull around a 300-kilogram robot."
VIDEO: Gripper for cleaning up space debris.
Next, Jiang and Parness went on a parabolic airplane flight to test the gripper in zero gravity. Over two days, they flew a series of 80 ascents and dives, which created an alternating experience of about 20 seconds of 2G and 20 seconds of zero-G conditions in the cabin. The gripper successfully grasped and let go of a cube and a large beach ball with a gentle enough touch that the objects barely moved when released.
Lastly, Parness' lab developed a small gripper that went up in the International Space Station (ISS), where they tested how well the grippers worked inside the station.
Next steps for the gripper involve readying it for testing outside the space station, including creating a version made of longer lasting materials able to hold up to high levels of radiation and extreme temperatures. The current prototype is made of laser-cut plywood and includes rubber bands, which would become brittle in space. The researchers will have to make something sturdier for testing outside the ISS, likely designed to attach to the end of a robot arm.
Back on Earth, Cutkosky also hopes that they can manufacture larger quantities of the adhesive at a lower cost. He imagines that someday gecko-inspired adhesive could be as common as Velcro.
Additional Stanford co-authors are Matthew A. Estrada, Srinivasan A. Suresh, Amy K. Han, Shiquan Wang, and Christopher J. Ploch. Christine Fuller and Neil Abcouwer of NASA JPL are also co-authors. Cutkosky is also a member of Stanford Bio-X and the Stanford Neurosciences Institute.
This work was funded by NASA, the National Science Foundation, and a Samsung Scholarship.
Published August 2017
Rate this article
View our terms of use and privacy policy